
 Impressum/Note Datenschutzerklärung
Impressum/Note Datenschutzerklärung|
Pages by Andreas Hofmeier |
|
Impressum/Note Datenschutzerklärung |
|---|
|
http[s]://www.abmh.de/fhs/GRT-L/Bericht/GRT.HTML/index.html |
|---|
Andreas Hofmeier
| Auftraggeber: | Prof. Dr. Philippsen, |
| Fachhochschule Bremen | |
| Ort der Durchführung: | FH Bremen, Flughafenallee 10, |
| Labor-Platz 5 im Raum 124 | |
| Abgabe am: | 01.03.2004 |
| Andreas Hofmeier | ___________________ |
Die zu regelnde Strecke bestand aus einem Motor, vor den eine elektronische Strecke geschaltet wurde. Durch die elektronische Strecke wurde die Strecke ``individuell'' gemacht. Die elektronische Strecke wurde auf folgende Werte eingestellt:
![]()
![]()
Die Messungen wurden an der Strecke auf Labor-Platz 5 im Raum 124 am Standort Flughafenallee 10 durchgeführt.
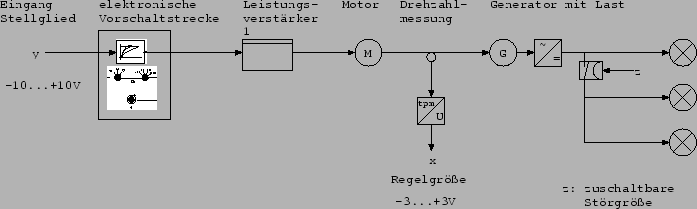
Die Stellgröße wird zuerst durch die vorgeschaltete elektronische Strecke geführt und anschließend mit Zuhilfenahme eines Treibers (Leistungsverstärkers) auf den Motor gegeben. Der Motor treibt ein Schwungrad und einen Generator an. Der Generator speist bis zu drei Lampen über einen Gleichrichter. Zwei der drei Lampen können mit Hilfe eines TTL-Eingangs zugeschaltet werden. Dies stellt die Störgröße dar. Im ``normalen'' Betrieb ist eine Lampe angeschlossen.
Die Regelgröße ist in diesem Fall die Anzahl der Drehungen pro Minute und wird am Schwungrad gemessen. Zu diesem Zweck sind gleichmäßig licht-aufnehmende und licht-reflektierende Flächen über die Höhe des Schwungrades verteilt. Ein Sensor stellt den Unterschied zwischen den sich abwechselnden Flächen her und sendet bei jeder reflektierenden Fläche einen Impuls. Ein Wandler zählt die Anzahl der Impulse pro Minute und errechnet daraus die Geschwindigkeit bzw. die Ausgangsspannung:
Diese bewegt sich in einem Bereich von ![]() bis
bis ![]() , was einer
Geschwindigkeit von
, was einer
Geschwindigkeit von ![]() Umdrehungen pro Minute in beide Richtungen
entspricht. (0V = Stillstand)
Umdrehungen pro Minute in beide Richtungen
entspricht. (0V = Stillstand)
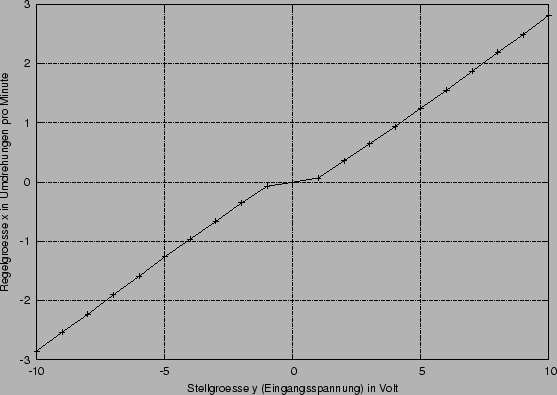
Um einen Überblick über das Streckenverhalten zu erlangen wurde die statische Kennlinie aufgenommen.
[1cm]
[1cm]
| y | x |
| 0 | 0,00 |
| 1 | 0,07 |
| 2 | 0,36 |
| 3 | 0,65 |
| 4 | 0,94 |
| 5 | 1,25 |
| 6 | 1,55 |
| 7 | 1,87 |
| 8 | 2,19 |
| 9 | 2,49 |
| 10 | 2,82 |
| y | x |
| 0 | 0,00 |
| -1 | -0,07 |
| -2 | -0,35 |
| -3 | -0,66 |
| -4 | -0,96 |
| -5 | -1,26 |
| -6 | -1,59 |
| -7 | -1,9 |
| -8 | -2,23 |
| -9 | -2,53 |
| -10 | -2,85 |
Die Messungen wurden in der hier aufgeführten Reihenfolge (von oben
nach unten, erst links dann rechts) durchgeführt. Die Eingangsspannung
![]() wurde mit Hilfe eines Potentiometers und eines analogen
Multimeters (siehe Geräteliste Seite
wurde mit Hilfe eines Potentiometers und eines analogen
Multimeters (siehe Geräteliste Seite ![]() ) eingestellt.
) eingestellt.
Nach dem sich die Ausgangsspannung (![]() ) auf einen festen Wert
eingestellt hatte, wurde dieser abgelesen. Es verging mindestens
eine Minute zwischen
) auf einen festen Wert
eingestellt hatte, wurde dieser abgelesen. Es verging mindestens
eine Minute zwischen
einstellen der Eingangsspannung und ablesen der
Ausgangsspannung. Die Ausgangsspannung wurde mit Hilfe des in der
Geräteliste (siehe Seite ![]() ) aufgeführten
Digitalmultimeters gemessen. Die statische Kennlinie:
) aufgeführten
Digitalmultimeters gemessen. Die statische Kennlinie:
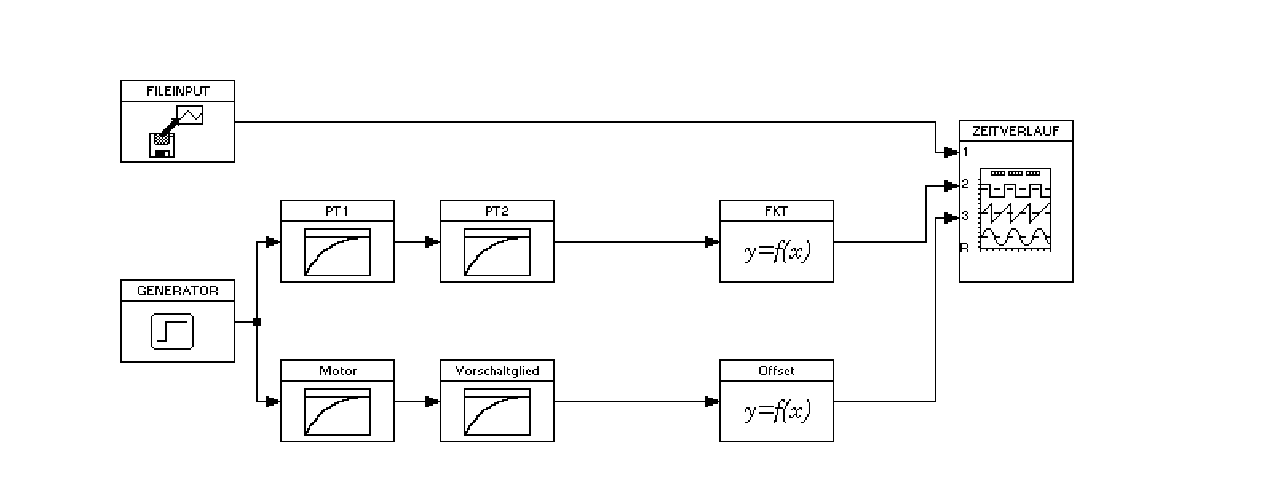
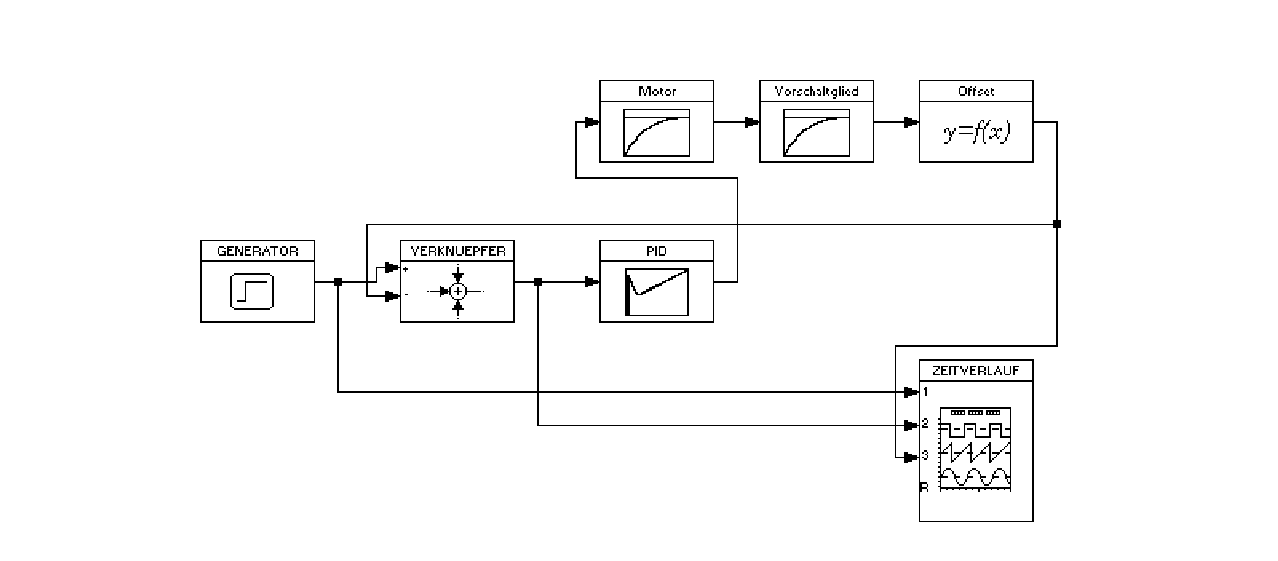
Nun wurde die Sprungantwort der Strecke mit Hilfe der Regelungs- und Simulationssoftware WinFACT/Boris aufgenommen. Diese Software wurde im gesamten weiteren Versuch verwendet und wird daher nicht immer wieder aufgeführt. Hier die ``Schaltung'' innerhalb der Simulationssoftware:
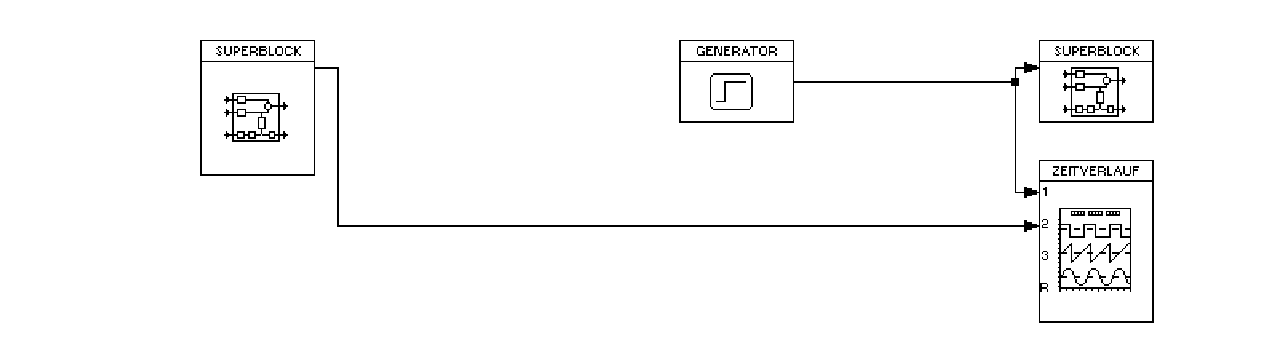
Es wurde folgender Sprung auf die Stellgröße (welche in diesem Fall die Eingangsgröße darstellt) gegeben. (Vor und nach dem Sprung wurde die Eingangsspannung lange genug konstant gehalten):
![]()
![]()
![]()
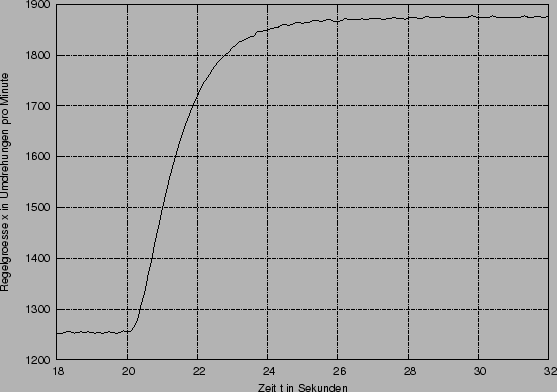
Reaktion der Regelgröße auf den Sprung:
Aus der Sprungantwort wurde mit Hilfe dieses Aufbaus die Ersatzstrecke abgeleitet:
Als erstes wurden aus der aufgenommenden Sprungantwort die Streckencharakteristiken entnommen.
(Siehe Seite ![]() im Anhang)
im Anhang)
![]()
![]()
Aus diesen Werten konnte die Ordnung der Strecke errechnet werden:
![]()
Die Umwandlung von ![]() in die Ordnung erfolgte durch ablesen einer
Tabelle aus dem GRT-Skript. Die Strecke ist laut dieser Rechnung
2. Ordnung. Sie wird also mit zwei hintereinandergeschalteten
P-
in die Ordnung erfolgte durch ablesen einer
Tabelle aus dem GRT-Skript. Die Strecke ist laut dieser Rechnung
2. Ordnung. Sie wird also mit zwei hintereinandergeschalteten
P-![]() -Gliedern im Computer nachgebildet.
-Gliedern im Computer nachgebildet.
Das die Rechnung eine Ordnung von ``nur'' zwei ergibt ist etwas verwunderlich. Denn die vorgeschaltete elektronische Strecke ist an sich schon mindestens zweiter Ordnung. Hinzu kommt der Montor mit erster Ordnung. Wahrscheinlich sind die weiteren Zeitkonstanten der Ordnungen der vorgeschalteten elektronischen Strecke so klein, dass sie nicht ins Gewicht fallen.
(Siehe Seite ![]() im Anhang)
im Anhang)
![]()
![]()
![]()
Diese Werte wurden dann auf die zwei P-![]() -Glieder ``aufgeteilt'',
welche die Strecke nachbilden sollten. Das erste stellt den Motor
(
-Glieder ``aufgeteilt'',
welche die Strecke nachbilden sollten. Das erste stellt den Motor
(![]() und
und ![]() ) da und das zweite die vorgeschaltete elektronische
Strecke (
) da und das zweite die vorgeschaltete elektronische
Strecke (![]() und
und ![]() ). Die Werte für den Motor waren auf Grund
eines vorher durchgeführten Versuches bekannt. Die Parameter für das
zweite P-
). Die Werte für den Motor waren auf Grund
eines vorher durchgeführten Versuches bekannt. Die Parameter für das
zweite P-![]() -Glied wurden auf Grund folgender Zusammenhänge errechnet:
-Glied wurden auf Grund folgender Zusammenhänge errechnet:
![]()
![]()
Probieren, also das gezielte drehen an diesen Parametern, führte zu folgenden Ergebnissen:
Motor:
![]()
![]()
P-![]() -Glied (entspricht der vorgeschalteten elektronischen Strecke):
-Glied (entspricht der vorgeschalteten elektronischen Strecke):
![]()
![]()
![]()
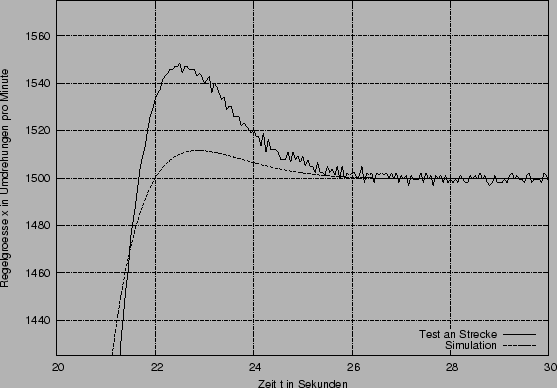
mit denen eine nahezu perfekte Simulation der Strecke möglich ist:
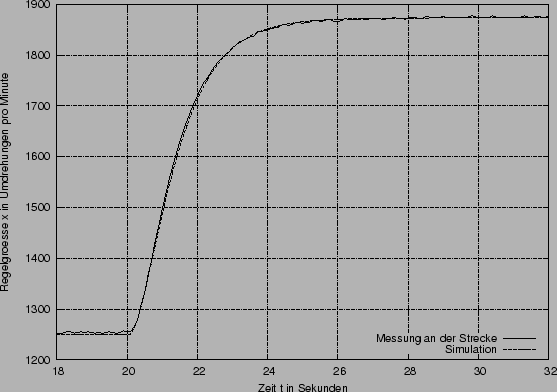
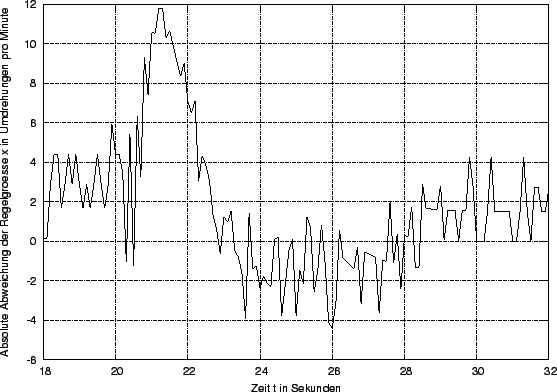
Weitere Betrachtungen: Die maximale Abweichung der Simulation von der Streckensprungantwort beträgt 11.8 Umdrehungen pro Minute. Der Mittelwert der absoluten Abweichung beträgt 1.7 Umdrehungen pro Minute. Rechts ist die absolute Abweichung in Umdrehungen pro Minute über die Zeit in dem betrachtetem Zeitraum von 18 bis 32 Sekunden aufgetragen.
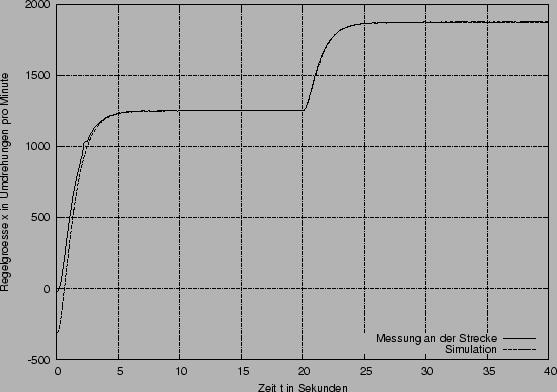
Links sehen Sie den gesamten Verlauf des Versuches zur Aufnahme der Sprungantwort und Ermittlung der Ersatzstrecke.
Mit Hilfe dieses Aufbaues wurden die entworfenen Regler im Computer getestet:
Mit Hilfe des Generators wurde der obligatorische Sprung auf den Regelkreis geschaltet. Eigentlich schaltet er zwei Sprünge auf den Regelkreis:
![]()
![]()
![]()
![]()
![]()
![]()
Es handelt sich hier um einen kompletten Regelkreis. Die Regelstrecke
(Motor, Vorschaltglied und Offset) ist in diesem Fall die im Abschnitt
![]() ab Seite
ab Seite ![]() hergeleitete Ersatzstrecke. Als
Regler kam der Software-PID-Regler zum Einsatz, in dem die jeweiligen
Parameter eingestellt wurden.
hergeleitete Ersatzstrecke. Als
Regler kam der Software-PID-Regler zum Einsatz, in dem die jeweiligen
Parameter eingestellt wurden.
Mit Hilfe dieses Aufbaus wurden die entworfenen Regler an der realen Strecke getestet:
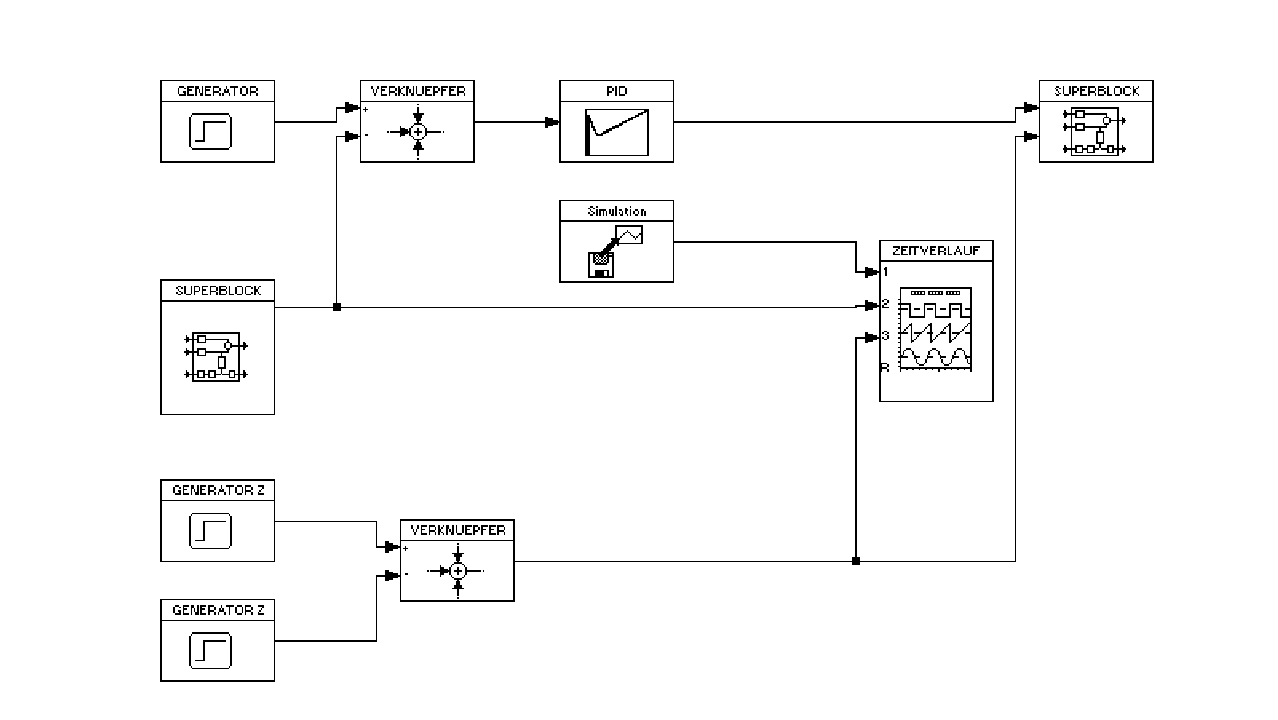
Mit Hilfe des Generators wurde der obligatorische Sprung auf den Regelkreis geschaltet. Auch hier handelt es sich um einen kompletten Regelkreis, mit dem Unterschied, dass die Regelstrecke diesmal die reale Strecke war. Mit Hilfe von Superblöcken wurde eine Verbindung zum IO-System von Wago realisiert. Das IO-System wurde mit der Strecke verdrahtet. Der Eingang der Strecke ist der Ausgangs der IO-Systems: Superblock rechts. Und umgekehrt.
Die Störungen wurden automatisch über einen weiteren Ausgang des
IO-Systems zugeschaltet. Dies wird realisiert, indem die beiden
Generatoren ``Generator Z'' jeweils +5V und -5V ausgeben. Zuerst ist
keiner der Generatoren aktiv. Die gesamte Ausgangsspannung ist 0V. TTL 0V
![]() keine Störung. Bei
keine Störung. Bei ![]() gibt der +5V-Generator
Spannung. Die Ausgangsspannung ist nun 5V. TTL 5V
gibt der +5V-Generator
Spannung. Die Ausgangsspannung ist nun 5V. TTL 5V
![]() ``Störung an''. Bei
``Störung an''. Bei ![]() gibt der -5V-Generator ebenfalls
Spannung, was zur gegenseitigen Auslöschung der Signale führt. TTL 0V
gibt der -5V-Generator ebenfalls
Spannung, was zur gegenseitigen Auslöschung der Signale führt. TTL 0V
![]() ``Störung aus''.
``Störung aus''.
Die Störung wurde wie bereits im Versuchsaufbau beschrieben mit Hilfe der Zuschaltung zweier zusätzlicher Lampen realisiert.
Als Regler kommt der Software-PID-Regler zum Einsatz, in dem die jeweiligen Parameter eingestellt wurden.
| Zeit t in s | Aktion |
| 0 | Sprung der Führungsgröße w von 0V auf 1V |
| 20 | Sprung der Führungsgröße w von 1V auf 1.5V |
| 40 | Störung z (bzw. zwei zusätzliche Lampen) an |
| 60 | Störung z (bzw. zwei zusätzliche Lampen) aus |
| 80 | Ende des Versuches |
In der Simulation war es mir leider nicht möglich die Störungen zu simulieren.
Die Formeln zur Errechnung der Reglerparameter und die Regeln zur Ablesung der Werte aus der Sprungantwort wurden alle aus dem GRT-Skript entnommen.
Das Toleranzband beträgt in unserem Fall 5%.
Es wurden die bereits ermittelten Streckenparameter in die Formeln für das schnelle Führungsverhalten eingesetzt:
[1cm]
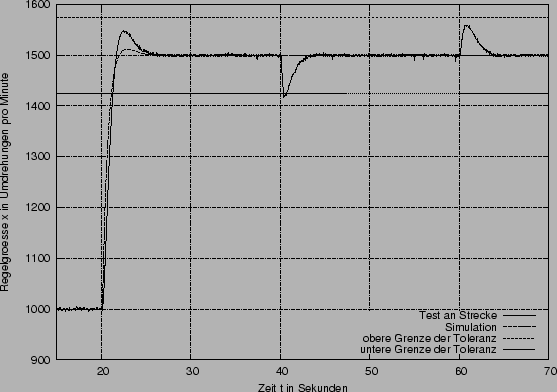
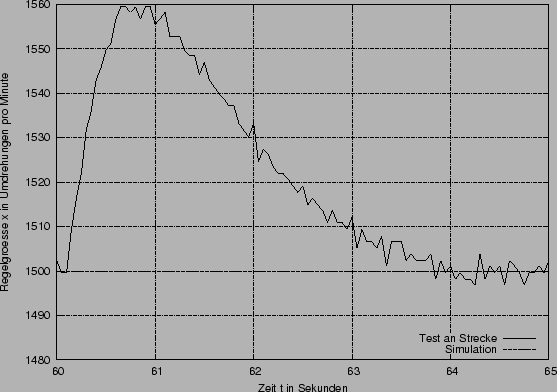
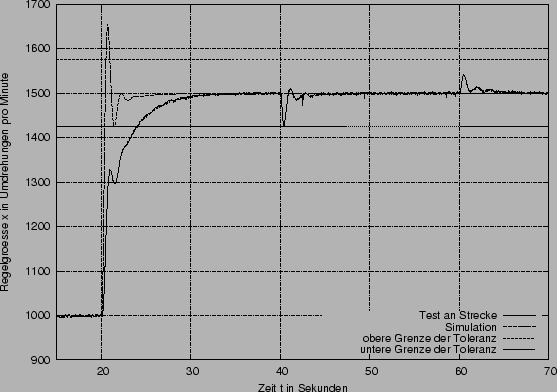
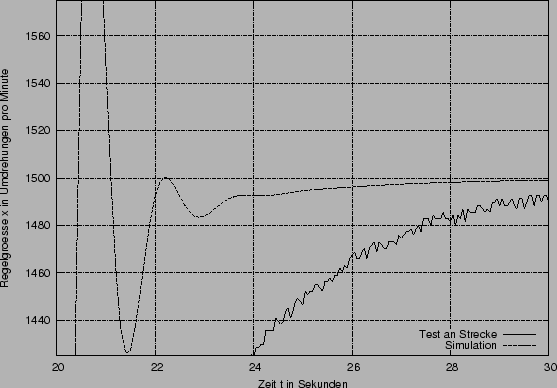
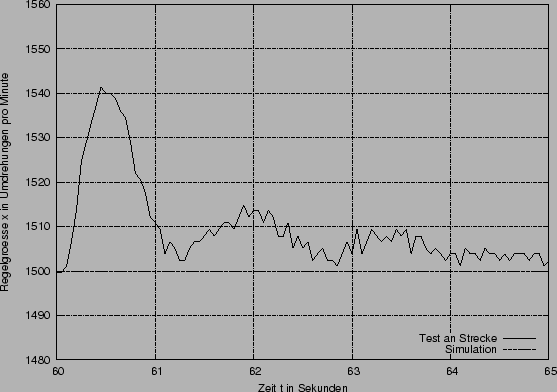
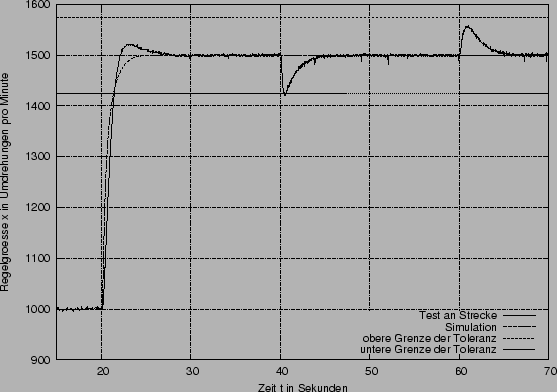
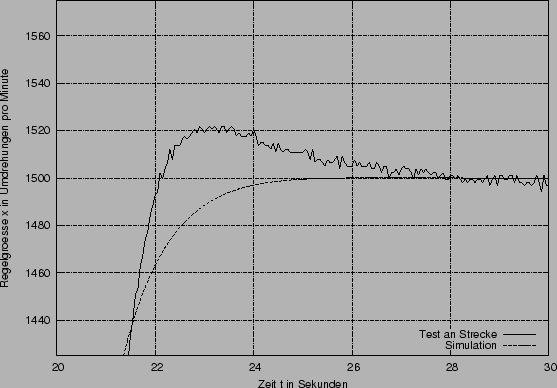
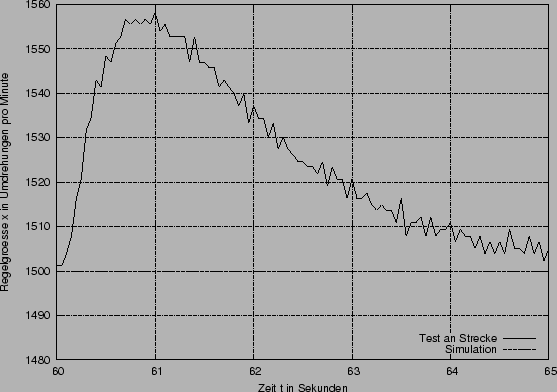
Der obere Graph zeigt den Verlauf der zweiten Sprungantwort (Sprung der Führungsgröße w von von 1V auf 1.5V, also 1000 auf 1500 Umdrehungen pro Minute) und der An- und Abschaltung der Last. Unten links sehen sie den Verlauf der Regelgröße bei dem zweiten Sprung. Die Diagrammgrenzen der Regelgröße entsprechen dem Tolereanzband von 5%. Diese Diagrammgrenzen werden im weiteren bei der Darstellung der zweite Sprungantwort beibehalten. Rechts ist die Abschaltung der Last dargestellt.
Für dies Einstellregel mussten zusätzliche Streckenwerte durch anlegen
der Tangente abgelesen werden (Siehe Seite ![]() im
Anhang). Es wurde die Regel für schnelles Führungsverhalten für den
PID-Regler angewendet.
im
Anhang). Es wurde die Regel für schnelles Führungsverhalten für den
PID-Regler angewendet.
[1cm]
![]()
![]()
![]()
![]()
![]()
Interessant ist hier die Abweichung des simulierten Verhaltens von dem
tatsächlichen: Im Gegensatz zur ![]() -Regel kommt es hier bei dem
zweiten Führungssprung zu einem erheblichen Überschwingen der
simulierten Strecke. Während bei der
-Regel kommt es hier bei dem
zweiten Führungssprung zu einem erheblichen Überschwingen der
simulierten Strecke. Während bei der ![]() -Regel das reale
Verhalten besser vorhergesagt wurde und das Überschwingen der
Simulation kleiner war.
-Regel das reale
Verhalten besser vorhergesagt wurde und das Überschwingen der
Simulation kleiner war.
Bei dem theoretischen Reglerentwurf für den PID-Regler werden die zwei größten Zeitkonstanten der Strecke kompensiert:

Ich nehme an, dass ![]() und
und ![]() die größten Zeitkonstanten sind. So
muss man lediglich dafür sorgen, dass
die größten Zeitkonstanten sind. So
muss man lediglich dafür sorgen, dass
![]() und
und
![]() gilt. Dann kürzen sich diese Zeitkonstanten weg.
gilt. Dann kürzen sich diese Zeitkonstanten weg.
Durch geschicktes umformen kann die Parameter des PID-Reglers aus ![]() und
und ![]() entnehmen:
entnehmen:
![]()
![]()
Für die beiden größten Zeitkonstanten habe ich die zwei mir bekannten gewählt:
![]() (Motor)
(Motor)
![]() (elektronische Strecke)
(elektronische Strecke)
Für die Berechnung der optimalen Reglerverstärkung aufgrund der maximalen
Überschwingweite sind die restlichen Zeitkonstanten der Strecke
erforderlich. Da diese nicht zu Verfügung standen, wurde die bei der
![]() -Regel gefundene Reglerverstärkung verwendet.
-Regel gefundene Reglerverstärkung verwendet.
![]()
Interessant ist hier die Abweichung des simulierten Verhaltens von dem tatsächlichen: Bei der Simulation kam es zu keinem Überschwinger beim zweiten Führungssprung, während die reale Strecke einen Überschwinger verursacht.
| Chien Hrones Reswick | theoretischer Entwurf | ||
| Überschwingweite | 50 | 0 | 20 |
| Anregelzeit | 1.3s | 4s | 1.5s |
| Ausregelzeit | 1.3s | 4s | 1.5s |
Da ein Regler mit I-Anteil mit einer ![]() -Strecke zum Einsatz kam
wurde stationäre Genauigkeit erreicht.
-Strecke zum Einsatz kam
wurde stationäre Genauigkeit erreicht.
In diesem Fall ist für mich der theoretische Reglerentwurf der
Sieger. Wenn allerdings die Überschwingweite innerhalb des
Toleranzbandes unberücksichtigt bleiben soll, so ist der nach
![]() -Regel entworfene Regler der beste, da er am schnellsten
ausregelt. Durch einstellen der Reglerverstärkung hätte der
theoretische Reglerentwurf schneller oder langsamer gemacht werden
können. Je schneller der Regler ist, desto größer ist leider auch die
Überschwingweite.
-Regel entworfene Regler der beste, da er am schnellsten
ausregelt. Durch einstellen der Reglerverstärkung hätte der
theoretische Reglerentwurf schneller oder langsamer gemacht werden
können. Je schneller der Regler ist, desto größer ist leider auch die
Überschwingweite.
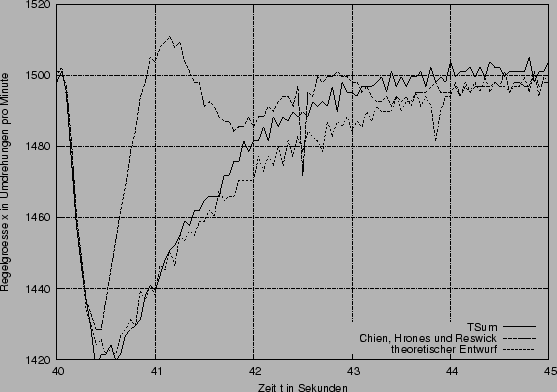
Nach einem ``kleinen Überschwinger'' regelten der theoretische und der
![]() -Regler die Störung in einem aperiodischen
Grenzfall-ähnlichen Verlauf aus. Der Chien, Hrones und Reswick-Regler
durchläuft, bis auf einen kleinen ``Schwinger'', einen aperiodischen
Grenzfall-ähnlichen Verlauf. Er ist der langsamste Regler. Allerdings
verursacht er keinen Überschwinger.
-Regler die Störung in einem aperiodischen
Grenzfall-ähnlichen Verlauf aus. Der Chien, Hrones und Reswick-Regler
durchläuft, bis auf einen kleinen ``Schwinger'', einen aperiodischen
Grenzfall-ähnlichen Verlauf. Er ist der langsamste Regler. Allerdings
verursacht er keinen Überschwinger.
Zuschalten der Last (zwei zusätzliche Lampen):
Abschalten der Last:
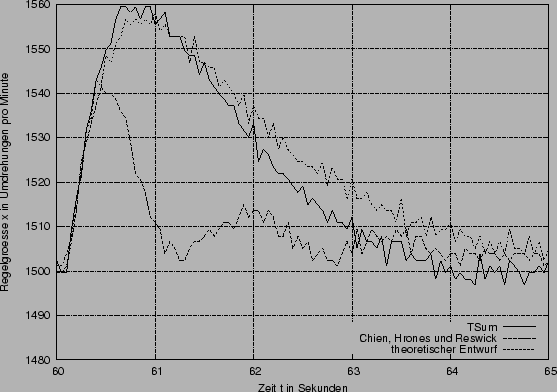
Störung die durch das Zuschalten der Last (zwei zusätzliche Lampen) verursacht wird:
| Chien Hrones Reswick | theoretischer Entwurf | ||
| Überschwingweite | -82 | -70 | -77 |
| Zeit bis
|
3.5s | 5s | 5s |
Störung die durch das Abschalten der Last verursacht wird:
| Chien Hrones Reswick | theoretischer Entwurf | ||
| Überschwingweite | 60 | 40 | 58 |
| Zeit bis
|
4s | 4.5s | 5.5s |
Deutlich zu erkennen ist, dass bei der Zuschaltung der Last eine deutlich größere Störung verursacht wird, als bei dem Abschalten. Dies Zuschalten führt zu einer Bremsung durch die Last am Generator und verlässt sogar kurz das Toleranzband von 5%. Diese Bremsung äußert sich im Sinken der Drehgeschwindigkeit, also einem absinken der Regelgröße. Dieses Absinken ist natürlich nur von kurzen Dauer, da der Regler die Störung ausregelt.
Beim wiederabschalten die Last wird die Bremse sozusagen gelöst, was im ersten Moment zu einer Beschleunigung führt.
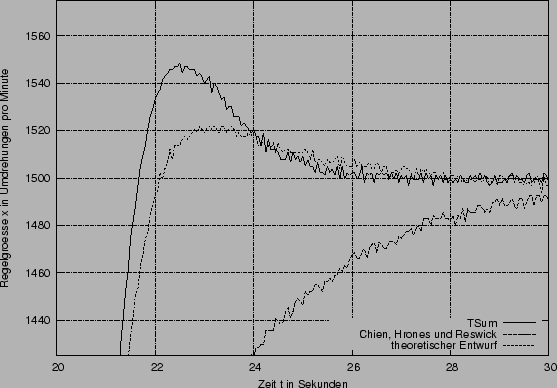
Deutlich zu erkennen ist, dass der nach Chien, Hrones und Reswick
eingestellte Regler zu Schwingungen neigt. Seine Überschwingweite ist
allerdings auch am kleinsten. Die beiden anderen Regler ![]() und
theoretischer Reglerentwurf verhalten sich ähnlich. Nach einem
Überschwinger (durch die Störung verursacht) lenken sie die Regelgröße
in einem aperiodischen Grenzfall-ähnlichen Verlauf auf den Sollwert
zurück.
und
theoretischer Reglerentwurf verhalten sich ähnlich. Nach einem
Überschwinger (durch die Störung verursacht) lenken sie die Regelgröße
in einem aperiodischen Grenzfall-ähnlichen Verlauf auf den Sollwert
zurück.
In diesem Fall ist der ![]() -Regler der klare Sieger, denn er
regelt am schnellsten innerhalb des Toleranzbandes aus. Er ist etwas
schneller als der theoretisch entworfene Regler, allerdings schwingt
er etwas mehr über. Durch ``herumdrehen'' an der Reglerverstärkung
hätte man den theoretisch entworfenen Regler noch erheblich schneller
machen können. So hätte dieser den
-Regler der klare Sieger, denn er
regelt am schnellsten innerhalb des Toleranzbandes aus. Er ist etwas
schneller als der theoretisch entworfene Regler, allerdings schwingt
er etwas mehr über. Durch ``herumdrehen'' an der Reglerverstärkung
hätte man den theoretisch entworfenen Regler noch erheblich schneller
machen können. So hätte dieser den ![]() -Regler schlagen
können. Die Verstärkung stellt die Geschwindigkeit, allerdings auch
die Überschwingweite, ein. Aus bereits erwähnten Gründen war eine
theoretische Berechnung der Reglerverstärkung leider nicht möglich.
-Regler schlagen
können. Die Verstärkung stellt die Geschwindigkeit, allerdings auch
die Überschwingweite, ein. Aus bereits erwähnten Gründen war eine
theoretische Berechnung der Reglerverstärkung leider nicht möglich.
| Gerät | Hersteller | Typ | Toleranz |
| Analoges Multimeter | Siemens | Multizet | |
| Digitales Multimeter | Fluke | 75 | |
| Stabilisiertes Netzteil |
Leybold | 726 86 | |
| Führungsgrößengeber | Leybold | 734 02 | |
| Übertragungsglied 2. Ordnung | Leybold | 734 059 | |
| Leistungsverstärker | Leybold | 734 13 | |
| Motor Generatorsatz, 24V, 3000
|
Leybold | 734 11 | |
| Lastschalter | Leybold | 734 39 | |
| IO-System | Wago | 750-842 | ca. |
| IO-S.-Netzteil | Wago | 787-912 | |
| PC | |||
| Drucker | HP | Deskjet 500 |
Als Quellen für diesen Bericht dienten die Vorlesung Grundlagen Regelungstechnik im Semester I3.2 WS 2003/2004 an der Hochschule Bremen bei Dr. Philippsen, sowie die dazugehörige Laborveranstaltung und das Skript.
|
Pages by Andreas Hofmeier |
|
Impressum/Note Datenschutzerklärung |
|---|
|
http[s]://www.abmh.de/fhs/GRT-L/Bericht/GRT.HTML/index.html |
|---|
 |
(c) Andreas B. M. Hofmeier This work is licensed under a Creative Commons Attribution-Noncommercial-Share Alike 3.0 Germany License |